

Het principe van deschroefstappenmotor: een schroef en moer worden gebruikt om in elkaar te grijpen, en een vaste moer wordt gebruikt om te voorkomen dat de schroef en moer ten opzichte van elkaar roteren, waardoor de schroef axiaal kan bewegen. Over het algemeen zijn er twee manieren om deze transformatie te realiseren.
De eerste is om een rotor met interne schroefdraad in de motor te bouwen en te realiserenlineaire bewegingDoor de interne schroefdraad van de rotor en de schroef in elkaar te laten grijpen, wordt dit een penetrerende schroefstappenmotor genoemd. (De moer is geïntegreerd met de motorrotor en de schroefas loopt door het midden van de motorrotor. Draai tijdens gebruik de schroef vast en zorg voor een antirotatie. Wanneer de motor wordt ingeschakeld en de rotor draait, beweegt de motor lineair langs de schroef. (Als de motor daarentegen vastzit terwijl de schroef antirotatie vertoont, zal de schroef een lineaire beweging maken.)
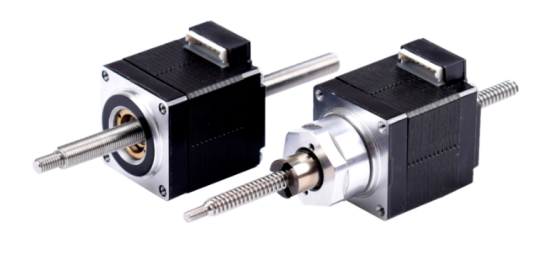
Door-as type
De tweede is om deschroefNet als de uitgaande as van de motor, wordt deze extern aangestuurd door een externe aandrijfmoer en schroef om een lineaire beweging te realiseren. Dit is de schroefstappenmotor met externe aandrijving. Het resultaat is een sterk vereenvoudigd ontwerp dat nauwkeurige lineaire bewegingen in veel toepassingen mogelijk maakt, direct met een schroefstappenmotor zonder de installatie van een externe mechanische koppeling. (De moer bevindt zich buiten de motor en is gekoppeld aan het aandrijfmechanisme. Wanneer de motor draait, beweegt de moer lineair langs de schroef.)
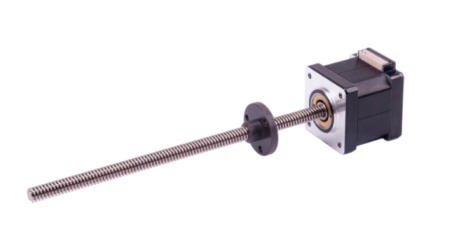
Extern schijftype
Toepassingsvoordelen van de door-as lineaire stappenmotor:
Vergelijking van de toepassingsscenario's waarbij extern aangedreven lineaire stappenmotoren worden gebruikt in combinatie metlineaire geleidingenDoorgaande lineaire stappenmotoren hebben hun eigen unieke voordelen, die voornamelijk tot uiting komen in de volgende 3 aspecten:
1.Maakt grotere fouten bij de systeeminstallatie mogelijk:
Over het algemeen zal bij gebruik van een extern aangedreven lineaire stappenmotor een slechte parallelliteit tussen de schroef- en geleidingsmontage waarschijnlijk leiden tot vastlopen van het systeem. Bij lineaire stappenmotoren met doorgaande as kan dit fatale probleem echter aanzienlijk worden verminderd dankzij de structurele kenmerken van het ontwerp, die een grotere systeemfout mogelijk maken.
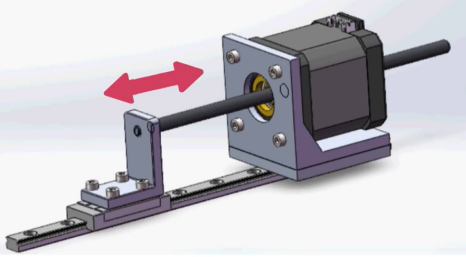
Wanneer de motor onder spanning staat, draait de moer met de rotor mee en de schroef is verbonden met een externe belasting en beweegt in een rechte lijn langs de geleider.
2.Niet beperkt door de kritische snelheid van de schroef:
Wanneer extern aangedreven lineaire stappenmotoren worden geselecteerd voor lineaire bewegingen met hoge snelheid, worden ze meestal beperkt door de kritische snelheid van de schroef. Bij een lineaire stappenmotor met doorgaande as is de schroef echter vast en antiroterend, waardoor de motor de slede van de lineaire geleiding kan aandrijven. Omdat de schroef stationair is, wordt deze niet beperkt door de kritische snelheid van de schroef bij het realiseren van hoge snelheden.
3.Dit bespaart installatieruimte:
De lineaire stappenmotor met doorgaande as neemt geen extra ruimte in beslag, groter dan de lengte van de schroef, dankzij het structurele ontwerp waarbij de moer in de motor is ingebouwd. Meerdere motoren kunnen op dezelfde schroef worden gemonteerd. De motoren kunnen niet door elkaar heen "lopen", maar hun bewegingen zijn onafhankelijk van elkaar. Daarom is het een geschikte keuze voor toepassingen met strengere ruimtevereisten.
Voor meer informatie kunt u contact met ons opnemen viaamanda@kgg-robot.comof+WA0086 15221578410.
Geplaatst op: 11-02-2025




